
CANの特徴は?
CAN通信の目的は何ですか?
そこで、”ワイヤーハーネスを削減する”、”複数のLANを介して大容量のデータを高速に通信する”ことを目的に、ドイツの電装メーカBOSCH社が自動車の電子制御システム向け通信プロトコルとしてCANを開発しました。 CANはISO11898で規格化され、自動車LANの標準プロトコルに位置づけられています。
キャッシュ
CANとLINの違いは何ですか?
LINとCANの違いとは
LINとCANはどちらも主に車載ネットワークで使用される通信規格で、両者ともコスト削減を目的として登場した背景があります。 このため一見すると類似した規格にも思えますが、通信方式に大きな違いがあるのです。 CANは通信するにあたってマルチマスタ方式、LINはシングルマスタ方式を採用。
CAN-bus通信とは何ですか?
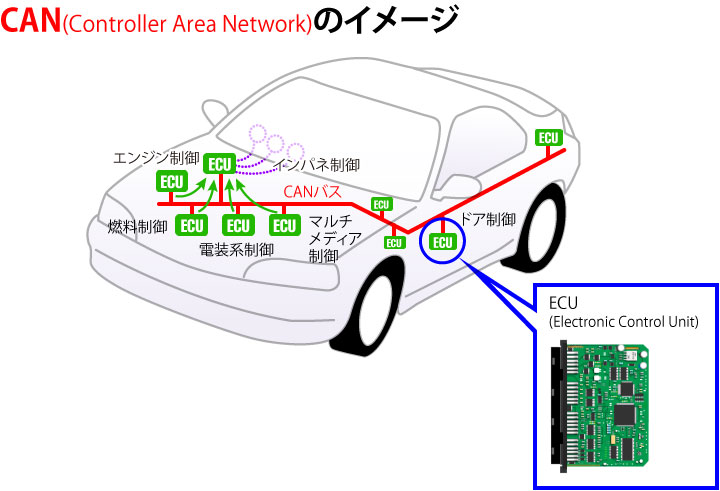
CANバス通信 CANでは通信線のことを「バス」、ECU(Electronic Control Unit)などの制御装置を「ノード」と呼び、ノードからバスを通じて別のノードにデータを送信していることから「CANバス通信」と呼ばれます。 また、バスへデータを送信することを「バスアクセス」とも言います。
キャン通信の仕組みは?
CAN通信では、データを必要とするノードからリモートフレームが送信され、そのデータを持ったノードからデータフレームを返すことで通信を行っています。
キャッシュ
CANの接続方式は?
CANは「 Peer to Peer(ピア・トゥ・ピア または ピア・ツー・ピア)※ 」のネットワークです。 複数の端末間で通信を行う際のアーキテクチャのひとつ。 対等の者(Peerとは「同等のもの」という意味)同士が通信をすることを特徴とする通信方式。 P2Pと略して記述されることが多い。
FlexRayとCANの違いは何ですか?
一見してわかる大きな差として、FlexRayの最大通信速度は、CANの10倍となる10Mbpsとなっている。 それ以外にも、CANを用いる場合より高度な機能を実現できるような仕様となっている。
プロトコルとはなにか?
プロトコルよみ:ぷろとこる、英字:protocol
プロトコルとは、コンピュータでデータをやりとりするために定められた手順や規約、信号の電気的規則、通信における送受信の手順などを定めた規格を意味します。 異なるメーカーのソフトウエアやハードウエア同士でも、共通のプロトコルに従うことによって、正しい通信が可能になります。
CXPI通信とは何ですか?
※CXPI(Clock Extension Peripheral Interface) 日本の自動車技術会が国際標準を目指す新車載通信方式。 高い応答性で、多重通信方式を採用する。 これまで、応答性、信頼性の課題で、通信を多重化できていない箇所に、CXPIを適用することで、ワイヤーハーネスの削減が可能になります。
CAN通信はノイズに強いですか?
外部からのノイズに強く、高い信頼性
高速CAN(CAN-C、クラスC)では、2本の通信線に発生する電圧差の有無によってデータを送信する「2線式差動電圧方式」を採用。 外部から加わるノイズは同一のため電圧差が起こらず、ノイズが発生しても影響を受けにくくなっています。
J1939とCANの違いは何ですか?
CAN 2.0 B仕様は単一フレームのメッセージのみを送信できますが、J1939プロトコルはダイアログやブロードキャストを含む単一および複数フレームのメッセージを送信できます。 J1939は、複数フレームのデータ伝送プロトコルに従って、メッセージをパック、送信、受信、合成、および再構成できます。
CAN FDとCANの違いは何ですか?
CANでは、1フレームのデータ長は最大8byteですが、CAN FDでは最大64byteに拡張しています。 また、通信ボーレートもCANでは最大1Mbpsですが、CAN FDではペイロードの1Mbps以上の送信対応が可能になっています。 その他、通信セキュリティの用途でもCAN-FDは期待されています。
FlexRayの特徴は?
FlexRayは、自動車メーカや主要サプライヤが共同で開発した、車載向け通信バス・システムの標準規格です。 確定性が高い上に、フォールトトレラント機能があり、データ伝送速度が高いことが特徴です。
プロトコルとAPIの違いは何ですか?
APIとプロトコルの違いはその着眼点にあります。 APIが、それが可能にする「機能」に着目してそう呼ばれるのに対して、プロトコルはマシンやサービス同士の通信を「どう可能にするか」に着目してそう呼ばれます。
IP は何の略ですか?
IPアドレスとは Internet Protocol Addressの頭文字を取った略語。 「インターネット上に接続された機器」に割り当てられる固有の番号のこと。 インターネットに接続する際、プロバイダーなどによってパソコンやスマートフォンなどの端末に割り当てられる。
CXPIの電圧はいくつですか?
CXPI規格準拠 通信速度対応範囲 5kbps to 20kbps. マスタ/スレーブ切り替え可能 マイクロコントローラインタフェースは3.3V/5.0V対応
CXPIのメリットは?
CXPIの特長 CSMA/CR方式を採用マスタ/スレーブスケジュール方式とCSMA/CR方式を組合せた動作を行い、スケジュールに基づく定期的な要求応答シーケンスの中で、イベントに応じたフレームを送信することが可能。 変調方式にPWMを採用ビット毎の同期併せが可能。
CAN通信のレベルはいくつですか?
通信に使われる電線は2本で、同時にデータを送信します。 それらはCAN Hi(ハイ)、CAN Lo(ロー)と呼ばれ、それぞれのコントローラ(CAN Nodeと呼ぶ)で解釈される電圧レベルが異なります。 CAN Hiは通常2.5V~3.75V、CAN Loは1.25V~2.5Vを示します。
CAN通信のメリットは?
シリアル通信プロトコル「CAN」を利用するメリットは、最小限の信号線で各種デバイスを接続できることです。 また、もともと自動車向けに開発されたため、外部からのノイズに強いことも特長です。
CANopenとCANの違いは何ですか?
CANopen は、CAN を通信媒体として使用し、センサーやアクチュエーター、I/O などの汎用デバイスを制御するプロトコルを標準化した 規格です。 OSI 参照モデルでは、CAN は物理層とデータリンク層の規格で、CANopen はアプリケーション層に相当する規格です (図 1 参照)。
J1939規格とは何ですか?
J1939はSAE(Society of Automotive Engineers, アメリカの自動車関連の標準規格の開発などを行っている非営利団体)から提供されている通信プロトコルで、トラック、バスなどのディーゼルエンジンの制御、トラクター‐トレーラー間の制御などに使用されています。


0 Comments