
Can-bus通信とは何ですか?
車のcanbusとは何ですか?
CAN-BUSとは CAN-BUSとは最近の自動車に多く採用されている車内LANの事で車両内にある電子制御ユニットはこのCAN-BUSによってデータ通信を行っています。 インターフェースを使用する事によって車両へのカーセキュリティーの取付けを簡単にすることが出来ます。
キャッシュ類似ページ
CAN通信のチャンネルとは何ですか?
CAN信号 – CANフレームデータフィールドに含まれる個々のデータ。 CAN信号は、「チャンネル」とも呼ばれます。 データフィールドには最大8バイトのデータを含めることができるため、1つのCANフレームに0~64個の個別信号を格納できます (64チャンネルの場合、すべてバイナリとなります)。
CAN通信 何ができる?
高速CANであれば最大1Mbpsの通信速度を実現し、さまざまなエラー検出メカニズムを実装しているので、ほぼ100%の確率で各種エラーを検出可能です。 さらに、もし1つでも異常なデータ送信が発生すれば、すべてのデータを削除して再度すべてのノードにデータを送り、成功するまで繰り返す方式を採用。
キャン通信の仕組みは?
CAN通信では、データを必要とするノードからリモートフレームが送信され、そのデータを持ったノードからデータフレームを返すことで通信を行っています。
Can-busの読み方は?
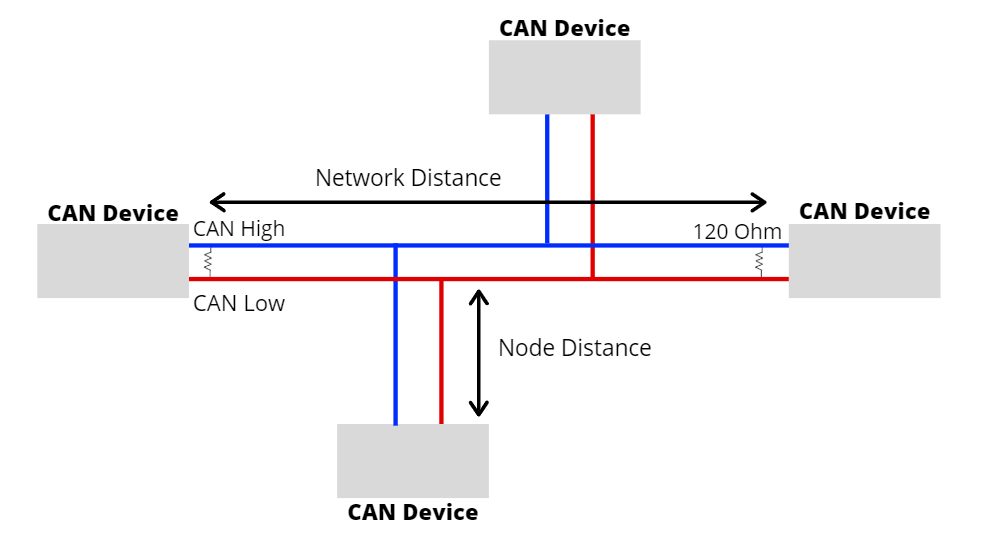
要はハーレーの車体にCANBUS(キャンバス)というLANが巡っていて、メーターやセンサーや車載コンピューターが接続されているという事。 CANBUSでは、差分信号線を使用した高速シリアル回線を使用して色々なセンサーやデバイスを接続している。
CAN通信の特徴は?
CANを活用した通信方式少ないハーネスで接続できるECU同士の通信が容易に行える拡張性が高い1つの情報を複数のECUで共有できるネットワーク全体の故障診断や処理が1ヶ所でできる
車のCAN通信速度は?
CANでは1回に送信できるデータ量は8バイト、最大通信速度は1Mbps(低速CANの場合は125Kbps)となっています。
J1939とCANの違いは何ですか?
CAN 2.0 B仕様は単一フレームのメッセージのみを送信できますが、J1939プロトコルはダイアログやブロードキャストを含む単一および複数フレームのメッセージを送信できます。 J1939は、複数フレームのデータ伝送プロトコルに従って、メッセージをパック、送信、受信、合成、および再構成できます。
CANとLINの違いは何ですか?
LINとCANの違いとは
LINとCANはどちらも主に車載ネットワークで使用される通信規格で、両者ともコスト削減を目的として登場した背景があります。 このため一見すると類似した規格にも思えますが、通信方式に大きな違いがあるのです。 CANは通信するにあたってマルチマスタ方式、LINはシングルマスタ方式を採用。
ジカ線とはどういう意味ですか?
※4 ジカ線 一つの信号のみを送信する導電ケーブル。
じか線とはどういう意味ですか?
自営線とは、一般送配電事業者以外の者が敷設する送電線のことです。 発電所と送電網の電力系統点を結ぶために整備されてきましたが、近年は自治体等も主体となり、電力の地産地消や、停電時の電力利用を目的として、地域の電源と需要地を直接結びつけるための利用も注目されています。
CANopenとCANの違いは何ですか?
CANopen は、CAN を通信媒体として使用し、センサーやアクチュエーター、I/O などの汎用デバイスを制御するプロトコルを標準化した 規格です。 OSI 参照モデルでは、CAN は物理層とデータリンク層の規格で、CANopen はアプリケーション層に相当する規格です (図 1 参照)。
J1939規格とは何ですか?
J1939はSAE(Society of Automotive Engineers, アメリカの自動車関連の標準規格の開発などを行っている非営利団体)から提供されている通信プロトコルで、トラック、バスなどのディーゼルエンジンの制御、トラクター‐トレーラー間の制御などに使用されています。
プロトコルとはなにか?
プロトコルよみ:ぷろとこる、英字:protocol
プロトコルとは、コンピュータでデータをやりとりするために定められた手順や規約、信号の電気的規則、通信における送受信の手順などを定めた規格を意味します。 異なるメーカーのソフトウエアやハードウエア同士でも、共通のプロトコルに従うことによって、正しい通信が可能になります。
CXPI通信とは何ですか?
※CXPI(Clock Extension Peripheral Interface) 日本の自動車技術会が国際標準を目指す新車載通信方式。 高い応答性で、多重通信方式を採用する。 これまで、応答性、信頼性の課題で、通信を多重化できていない箇所に、CXPIを適用することで、ワイヤーハーネスの削減が可能になります。
CANオープンとは何ですか?
CANopenとは、組み込み向けの通信プロトコルです。 2004年にドイツの「CAN in Automation(以下CiAと称します)」によって規格化され、今日まで発展を続けてきました。 CiAは、多様な分野でCANopenデバイスを使用できるよう、各分野向けに通信仕様書を策定しオープンにしてきました。
オープンな通信規格は?
典型的なオープンネットワークが、有線LANの「IEEE 802.3」や無線LANの「IEEE 802.11」です。 前者は「Ethernet」、後者は「Wi-Fi」として知られています。 これらは規格が公開されているため、どのメーカーでも自由に対応製品を作ることができます。
プロトコルとAPIの違いは何ですか?
APIとプロトコルの違いはその着眼点にあります。 APIが、それが可能にする「機能」に着目してそう呼ばれるのに対して、プロトコルはマシンやサービス同士の通信を「どう可能にするか」に着目してそう呼ばれます。
通信プロトコル ないとどうなる?
全世界のネットワーク機器がお互いに適切な通信を行えるように定めた規定がIP (Internet Protocol) です。 もしIPというプロトコルが定められていなければ、世界中のコンピュータ同士がお互いに通信することはできません。
CXPIのメリットは?
CXPIの特長 CSMA/CR方式を採用マスタ/スレーブスケジュール方式とCSMA/CR方式を組合せた動作を行い、スケジュールに基づく定期的な要求応答シーケンスの中で、イベントに応じたフレームを送信することが可能。 変調方式にPWMを採用ビット毎の同期併せが可能。


0 Comments