
O que é a câmera RGB D?
Resumo
RGB-D geralmente se refere a dados vermelhos, verdes, azuis e de profundidade capturados por sensores RGB-D. Uma imagem RGB-D fornece uma informação de profundidade por pixel alinhada com pixels de imagem correspondentes.
Resumo – câmeras LIDAR e RGB são sensores comumente usados em veículos autônomos. No entanto, ambos têm limitações: o Lidar fornece profundidade precisa, mas é escassa na resolução vertical e horizontal; As imagens RGB fornecem textura densa, mas não possuem informações de profundidade.
A precisão de ambos os sistemas foi de aproximadamente 1.00, que é clinicamente aceitável.
Consumidor RGB-D Sensores: no entanto, esses sensores custam cerca de US $ 10.000 cada. Por outro lado, os novos sensores RGB-D do consumidor custam menos de US $ 200. A tecnologia de detecção de profundidade por pixel que é usada nas câmeras RGB-D do consumidor foi desenvolvida pela PrimeSense.
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
Adicionar dados RGB a uma nuvem de ponto de detecção de profundidade 3D ou mapa de profundidade permite identificar objetos de maneira mais eficaz para reconhecimento ou detecção de padrões. Isso é particularmente útil em aplicações que precisam identificar o tipo e a natureza dos objetos na cena, além de medir a profundidade para eles.
Lidar vs câmeras: No entanto, a diferença fundamental entre a tecnologia Lidar e a câmera é que o lidar emite a luz que vê, enquanto as câmeras não. Isso dá ao Lidar a capacidade de calcular distâncias incrivelmente precisas para muitos objetos que são detectados simultaneamente.
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
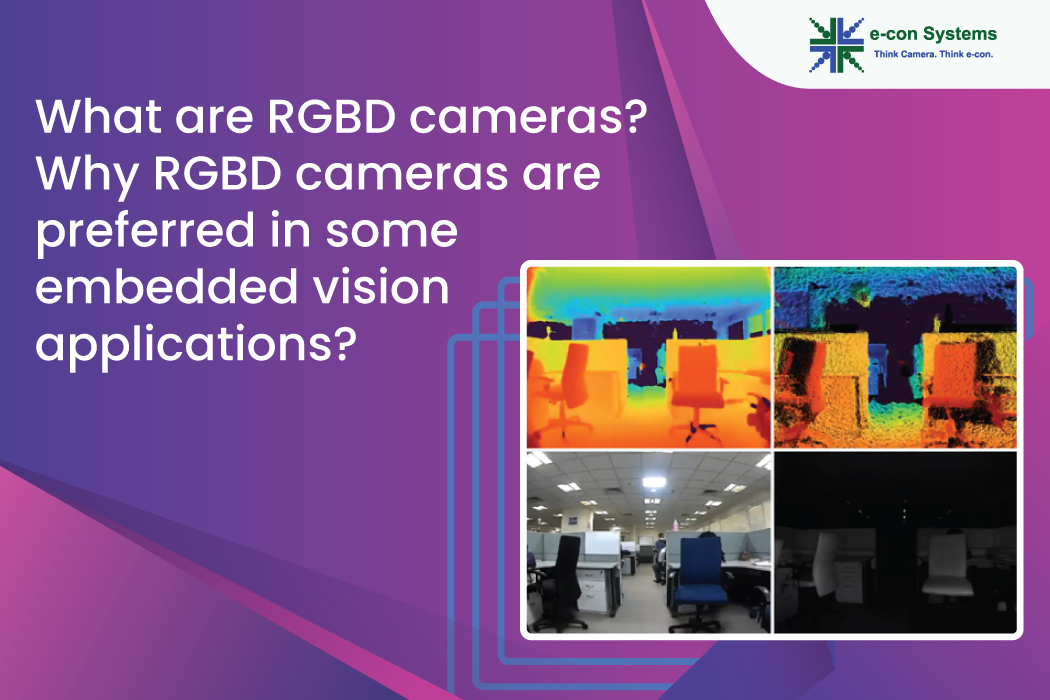
Uma imagem RGB-D é simplesmente uma combinação de uma imagem RGB e sua imagem de profundidade correspondente. Uma imagem de profundidade é um canal de imagem no qual cada pixel se refere a uma distância entre o plano da imagem e o objeto correspondente na imagem RGB.
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
O menor sensor de imagem disponível comercial é o OV6948, medindo 0.575 mm x 0.575 mm x 0.232 mm, fabricado por Omnivision Technologies, Inc. (EUA).
Perguntas e respostas
1. O que o RGBD significa em uma câmera?
RGB-D geralmente se refere a dados vermelhos, verdes, azuis e de profundidade capturados por sensores RGB-D. Uma imagem RGB-D fornece uma informação de profundidade por pixel alinhada com pixels de imagem correspondentes.
2. Qual é a diferença entre a câmera RGB-D e o lidar?
Resumo – câmeras LIDAR e RGB são sensores comumente usados em veículos autônomos. No entanto, ambos têm limitações: o Lidar fornece profundidade precisa, mas é escassa na resolução vertical e horizontal; As imagens RGB fornecem textura densa, mas não possuem informações de profundidade.
3. Quão preciso é uma câmera RGB-D?
A precisão de ambos os sistemas foi de aproximadamente 1.00, que é clinicamente aceitável.
4. Quanto custa as câmeras RGB-D?
Consumidor RGB-D Sensores: no entanto, esses sensores custam cerca de US $ 10.000 cada. Por outro lado, os novos sensores RGB-D do consumidor custam menos de US $ 200. A tecnologia de detecção de profundidade por pixel que é usada nas câmeras RGB-D do consumidor foi desenvolvida pela PrimeSense.
5. Quais são as desvantagens da câmera RGB-D?
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
6. Quais são as vantagens das câmeras RGB-D?
Adicionar dados RGB a uma nuvem de ponto de detecção de profundidade 3D ou mapa de profundidade permite identificar objetos de maneira mais eficaz para reconhecimento ou detecção de padrões. Isso é particularmente útil em aplicações que precisam identificar o tipo e a natureza dos objetos na cena, além de medir a profundidade para eles.
7. Que é melhor lidar ou câmeras?
Lidar vs câmeras: No entanto, a diferença fundamental entre a tecnologia Lidar e a câmera é que o lidar emite a luz que vê, enquanto as câmeras não. Isso dá ao Lidar a capacidade de calcular distâncias incrivelmente precisas para muitos objetos que são detectados simultaneamente.
8. Quais são as desvantagens da câmera RGB-D?
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
9. Qual é a diferença entre RGB e RGB-D?
Uma imagem RGB-D é simplesmente uma combinação de uma imagem RGB e sua imagem de profundidade correspondente. Uma imagem de profundidade é um canal de imagem no qual cada pixel se refere a uma distância entre o plano da imagem e o objeto correspondente na imagem RGB.
10. Quais são as desvantagens da câmera RGB-D?
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
11. Qual é a menor câmera RGB?
O menor sensor de imagem disponível comercial é o OV6948, medindo 0.575 mm x 0.575 mm x 0.232 mm, fabricado por Omnivision Technologies, Inc. (EUA).
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] O que significa RGBD na câmera
RGB-D geralmente se refere a dados vermelhos, verdes, azuis e de profundidade capturados por sensores RGB-D. Uma imagem RGB-D fornece uma informação de profundidade por pixel alinhada com pixels de imagem correspondentes.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a diferença entre a câmera RGB-D e o lidar
Resumo – câmeras LIDAR e RGB são sensores comumente usados em veículos autônomos. No entanto, ambos têm limitações: o Lidar fornece profundidade precisa, mas é escassa na resolução vertical e horizontal; As imagens RGB fornecem textura densa, mas não possuem informações de profundidade.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quão precisa é a câmera RGB-D
A precisão de ambos os sistemas foi de aproximadamente 1.00, que é clinicamente aceitável.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quanto custa as câmeras RGB-D
Consumidor RGB-D sensores
No entanto, esses sensores custam cerca de US $ 10.000 cada. Por outro lado, os novos sensores RGB-D do consumidor custam menos de US $ 200. A tecnologia de detecção de profundidade por pixel que é usada nas câmeras RGB-D do consumidor foi desenvolvida pela PrimeSense (http: // www.PrimeSense.com/en/tecnologia/115-the-PrimeSense-3D-Sensing-Solution).
CachedSimilar
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quais são as desvantagens da câmera RGB-D
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quais são as vantagens das câmeras RGBD
Adicionar dados RGB a uma nuvem de ponto de detecção de profundidade 3D ou mapa de profundidade permite identificar objetos de maneira mais eficaz para reconhecimento ou detecção de padrões. Isso é particularmente útil em aplicações que precisam identificar o tipo e a natureza dos objetos na cena, além de medir a profundidade para eles.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Que é melhor lidar ou câmeras
Lidar vs câmeras
No entanto, a diferença fundamental entre o Lidar e a tecnologia da câmera é que o lidar emite a luz que vê, enquanto as câmeras não. Isso dá ao Lidar a capacidade de calcular distâncias incrivelmente precisas para muitos objetos que são detectados simultaneamente.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quais são as desvantagens da câmera RGB-D
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a diferença entre RGB e RGB-D
Uma imagem RGB-D é simplesmente uma combinação de uma imagem RGB e sua imagem de profundidade correspondente. Uma imagem de profundidade é um canal de imagem no qual cada pixel se refere a uma distância entre o plano da imagem e o objeto correspondente na imagem RGB.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quais são as desvantagens da câmera RGB D
Como mencionado acima, a câmera RGB-D falha em capturar objetos e superfícies feitas de materiais transparentes, reflexivos e absorventes. Além disso, quando pelo menos duas câmeras são usadas para ver a mesma cena, o problema de interferência diminui a qualidade do mapa de profundidade estimado.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a menor câmera RGB
O menor sensor de imagem disponível comercial é o OV6948, medindo 0.575 mm x 0.575 mm x 0.232 mm, fabricado por Omnivision Technologies, Inc. (EUA). O registro é baseado em testes de produtos e pesquisas de mercado realizadas pela Transparency Market Research em Pune, Índia, em 10 de abril de 2019.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] RGB é bom para os olhos
A resposta é não. Não há nada de especial na iluminação RGB e iluminação LED, a luz é leve e, desde que a intensidade da luz visível esteja dentro dos limites seguros, ela não prejudicará os olhos de ninguém. Se alguma coisa, as luzes RGB são como luzes LED, que são mais seguras porque não produzem luz UV.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a diferença entre a câmera de profundidade e a câmera RGB
As informações de profundidade são recuperáveis através de um mapa/imagem de profundidade criado por um sensor de profundidade 3D, como um sensor estéreo ou sensor de tempo de vôo. As câmeras RGBD são capazes de fazer uma fusão de pixel a pixel de dados RGB e informações de profundidade para fornecer ambos em um único quadro.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Como funciona o sensor RGBD
Os sensores RGB-D são um tipo específico de dispositivos de detecção de profundidade que funcionam em associação com uma câmera de sensor RGB (vermelho, verde e azul). Eles são capazes de aumentar a imagem convencional com informações de profundidade (relacionadas à distância ao sensor) em base por pixel.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a desvantagem do lidar
Outra desvantagem do uso de dados LIDAR para análise de terrenos é a dificuldade e a incerteza da interpretação e análise dos dados. Os dados do LIDAR podem fornecer informações ricas e detalhadas sobre o terreno, mas também podem ser ambíguas e complexas para interpretar e analisar.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quais são as desvantagens da câmera LIDAR
– Limitações do Drone Lidarmuch maior investimento em equipamentos (em comparação com outras tecnologias), embora econômicos quando usados em grandes escalas, pode ser caro para capturar dados em áreas menores.A precisão é altamente dependente da qualidade e calibração do scanner, componentes IMU e GNSS do sistema.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] O que é o sensor argb d
Os sensores RGB-D são um tipo específico de dispositivos de detecção de profundidade que funcionam em associação com uma câmera de sensor RGB (vermelho, verde e azul). Eles são capazes de aumentar a imagem convencional com informações de profundidade (relacionadas à distância ao sensor) em base por pixel.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a diferença entre RGB e RGB D
Uma imagem RGB-D é simplesmente uma combinação de uma imagem RGB e sua imagem de profundidade correspondente. Uma imagem de profundidade é um canal de imagem no qual cada pixel se refere a uma distância entre o plano da imagem e o objeto correspondente na imagem RGB. Você pode usar o Kinect para capturar essas imagens RGB-D.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a menor qualidade da câmera
256×256 – Encontrado em câmeras muito baratas, esta resolução é tão baixa que a qualidade da imagem é quase sempre inaceitável. Isso é 65.000 pixels no total. 640×480 – Esta é a extremidade baixa na maioria "real" câmeras. Esta resolução é ideal para fotos por e-mail ou postar fotos em um site.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a câmera mais simples do mundo
Conheça SolarCan Puck – a câmera mais simples do mundo.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Quais são os contras do RGB
RGB Consnot o padrão do setor – mais comum em web design do que a impressão.Nem todo mundo vai trabalhar com imagens RGB.Confia um pouco na luz, que a impressão não fornece como um monitor de computador.Pode ser uma ligeira mudança de cor da tela para a impressão.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a melhor configuração RGB para os olhos
Normalmente, você quer ter um contraste de 1: 1000. O ponto mais brilhante emitirá 1000x mais claro que o local mais escuro. Tudo bem porque quanto maior o contraste, mais desafiador será para seus olhos.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Qual é a diferença entre a imagem RGB e a imagem de profundidade
Uma imagem RGB-D é simplesmente uma combinação de uma imagem RGB e sua imagem de profundidade correspondente. Uma imagem de profundidade é um canal de imagem no qual cada pixel se refere a uma distância entre o plano da imagem e o objeto correspondente na imagem RGB.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Por que Elon é Musk contra o Lidar
O primeiro é que é muito caro. O segundo, por outro lado, é quase filosófico. O próprio Musk explicou que “montar lidars no carro significa enchê -lo com apêndices caros. Mas em um carro todo acessório adicionado é uma coisa ruim: é ridículo encher o carro com esses dispositivos.
[/wpremark]
[wPremark Preset_name = “chat_message_1_my” icon_show = “0” Background_color = “#e0f3ff” Padding_right = “30” Padding_left = “30” Border_radius = “30”] [WPREMARK_ICON ICON = “Quott-LEFT-Solid” 32 “Height =” 32 “] Por que Tesla parou de usar lidar
Ele também disse que qualquer empresa que depende desse tipo de tecnologia está condenada. Ele argumenta que o lidar é muito caro e que mapear o mundo e mantê-lo atualizado é muito caro. Em vez disso, Tesla se concentra em sistemas baseados em visão, que ele acredita ser mais eficaz e econômico.
[/wpremark]

